Implementing FK’s are vastly different to the IK’s. FK do not have any conventional handles unlike IK. FK allows us to move certain parts of the joints rather than as a collective IK, it gave more control during animation and it was a potential fix for the elbow snapping issue.
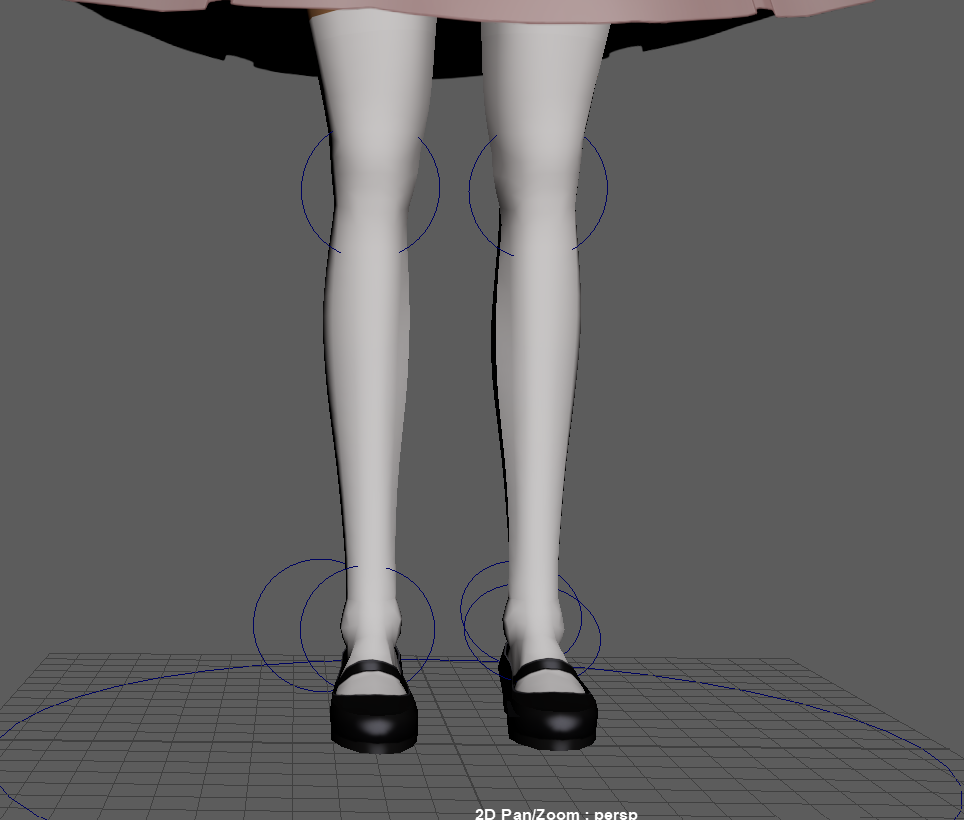
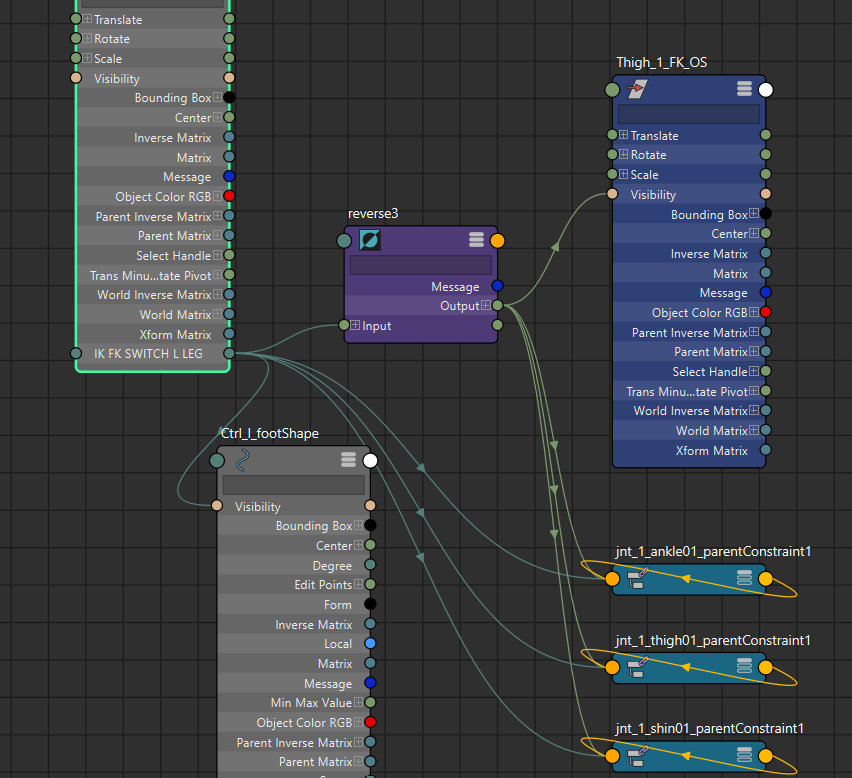
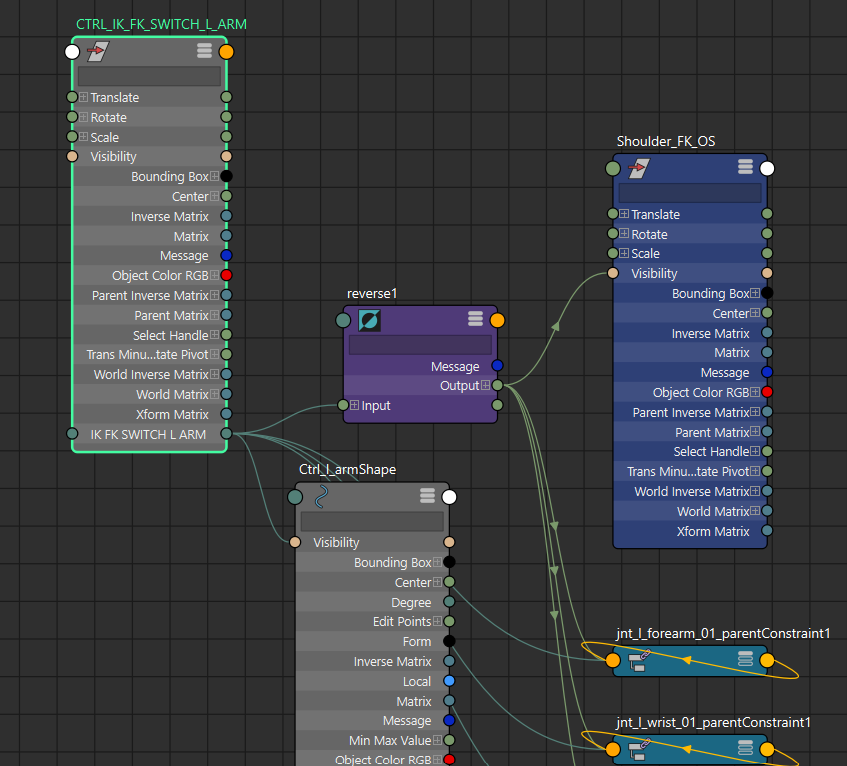
So I implemented the FK’s into each limb by adding parent constraints and controls onto each joint as shown here.
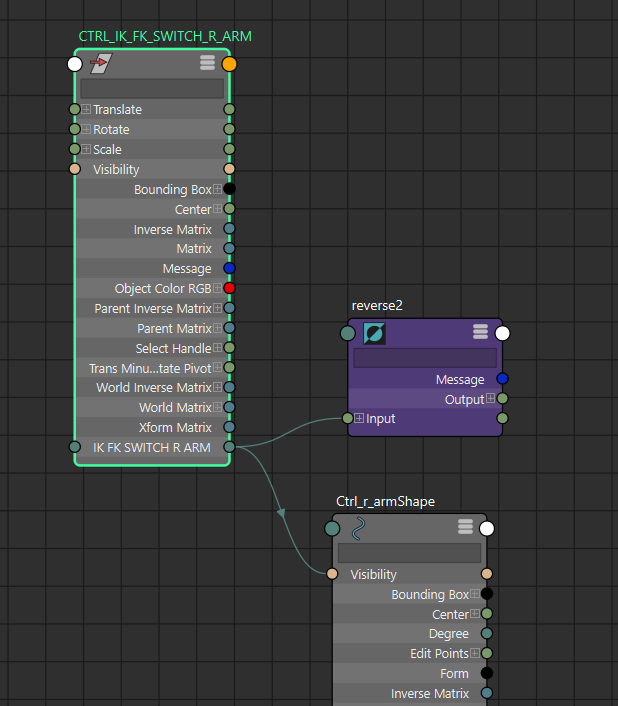
A system called the IK/FK switch was implemented.
But whilst I was experimenting with this change, I still wasn’t able to find a solution to the ‘elbow-snapping’ problem.
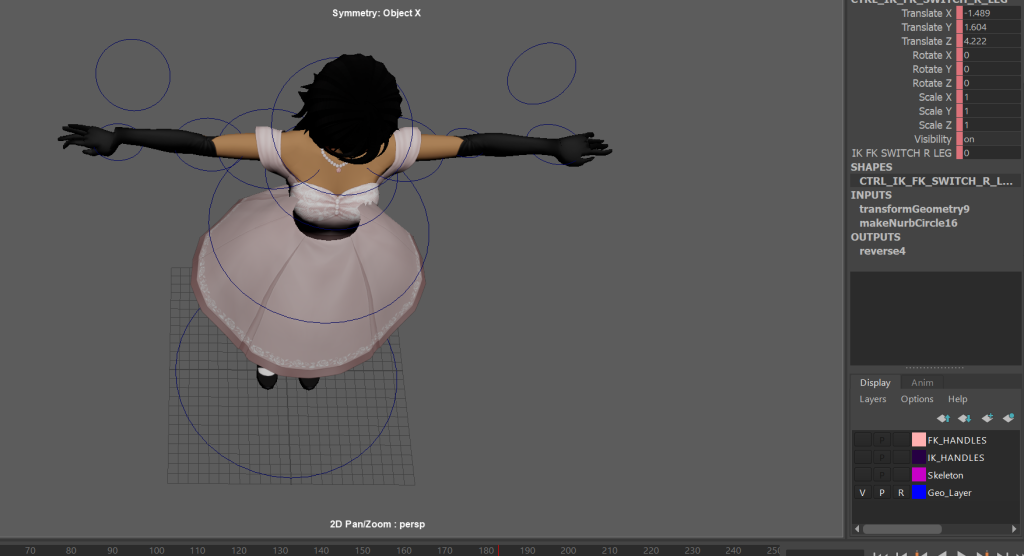
Once I implemented this system, I noticed another issue which directly affected the spine and the right arm’s FK.
So I had to remake the spine curve, readjusting the positioning back onto the root joint.
I was able to remake my hand controls with ease. The hands also improved, although the thumb would still stick out.
I was able to fix the ‘elbow snapping’ problem by adding extra controls that were directly connected to the elbow. This allowed me to control the elbows positioning using the control’s pole vector attatchment.
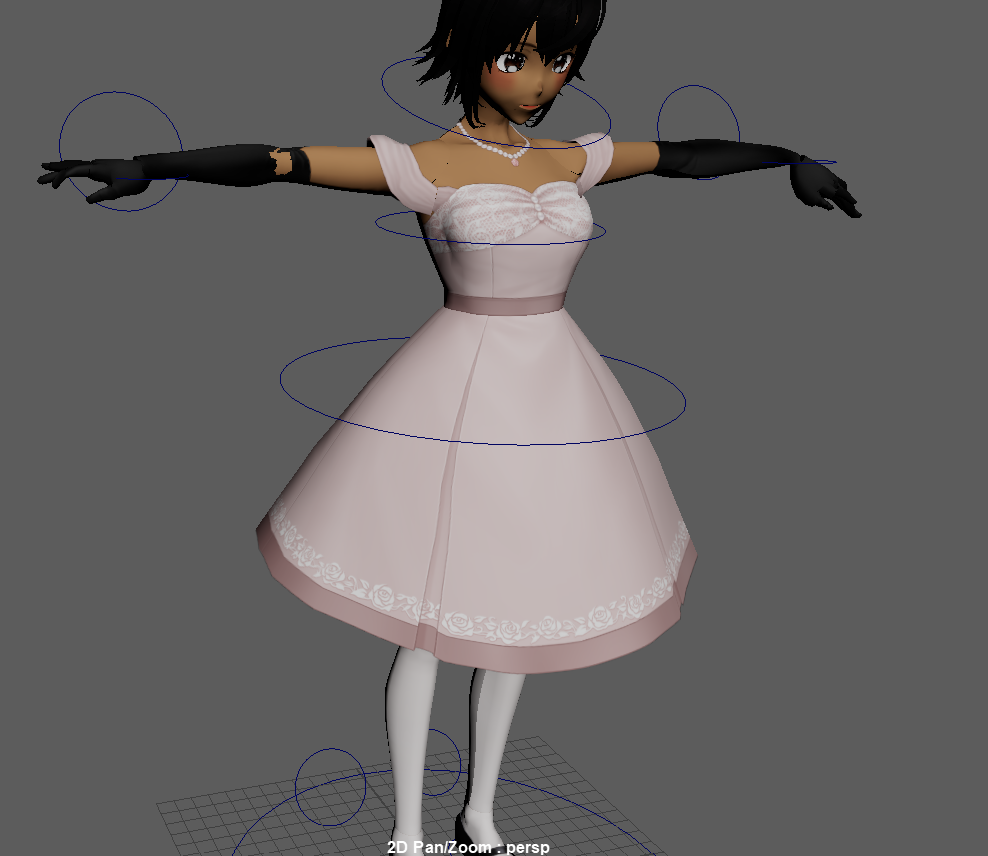
These major changes have allowed me to start the animation pipeline as my rig was now fully ready to be used within the workspace.